
|
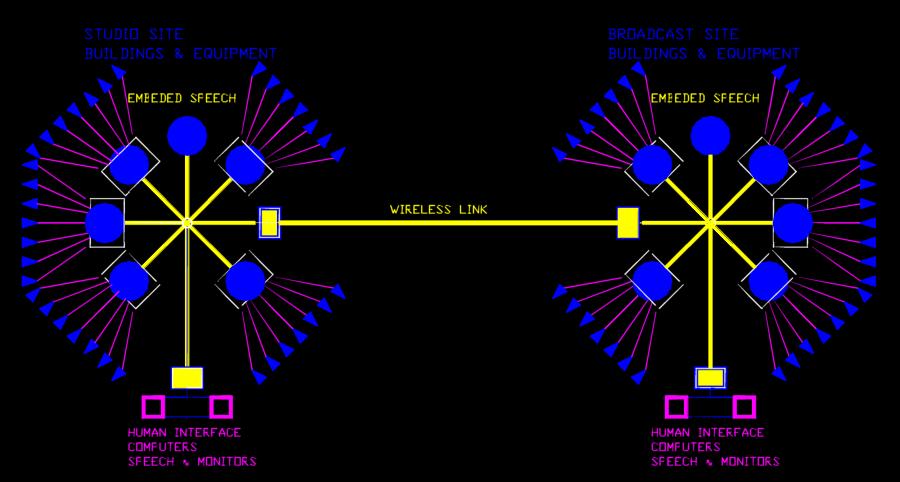
Pictorial Diagram |
|
PICTORIAL
Each Node has both inputs and outputs... |
Module personality
Each module is hardwired to its devices (motors, sensors, etc); and as such, cannot change its function. However, the personality of each module can be changed. And, in theory (and I have not done this), each module can do an entirely different job. Because my systems are hardwired - the modules can only modify the way that they control their external things. When my modules come to life, they are born with a default personality. And this is how they handle business-as-usual. Personality - is controlled by one byte yielding a possible 255 different personalities. Theoretically, if a module is destroyed by chemicals, explosion, etc; then another module could assume some of those responsibilities by changing its personality.Communication syntax and grammar
|
"Todays robots are very primitive, capable of understanding only a few simple instructions such as "go left", "go right", and "build car"".
- John Sladek |